
トラックの車線変更では、ウインカーを出す前に、前方とミラーで車線変更を検討できる状況か確認することが出発点です。そのうえで、車線を変え始める約3秒前に合図を出し、後続車との距離・速度差をミラーで再確認して、変更する側の死角を目視で補います。
合図を出しても、隣接車線へ入る権利が生じるわけではありません。後続車に急ブレーキや急ハンドルをさせるおそれがある場合や、側方・後方の安全を確認できない場合は、車線変更せず次の機会を待つことが基本です。
トラック事故の主な原因と、バック・右左折・追突・横転など場面別の対策をまとめて確認したい場合は、【トラックの事故】多い原因と防止策も参考にしてください。

- トラックで車線変更するときの確認順序
- ウインカーを出す約3秒前という数値の意味
- ミラー・目視・カメラの役割の違い
- 車線変更を中止すべき具体的な条件
- 合図不履行・進路変更禁止違反の点数と反則金
結論|トラックの車線変更は6段階で確認する
トラックの車線変更は、次の6段階で確認します。重要なのは、合図を出す前にも安全確認を行い、合図を出した後にもミラーと目視で再確認することです。
- 前方とミラーで事前確認する
道路標示、前方の交通状況、隣接車線、後続車の流れを確認します。 - 車線を変え始める約3秒前に合図する
周囲へ進路変更の意思を伝えます。 - ミラーで距離と速度差を再確認する
合図後に後続車が近づいていないか確認します。 - 変更する側の死角を目視で補う
ミラーに映らない側方・後方を短時間で確認します。 - 緩やかに車線変更する
急ハンドルを避け、変更中も前方とミラーを確認します。 - 変更後に合図解除と周囲確認を行う
車線内へ収まったこと、前後の車間、合図の解除を確認します。
道路交通法令や警察庁の交通教則では、進路変更前に安全を確かめ、進路を変えようとする時の約3秒前に合図する考え方が示されています。3秒が経過しただけで車線変更できるわけではなく、その間も周囲の状況は変化するため、再確認が必要です。
確認できないときは車線変更しない
次のいずれかに当てはまる場合は、無理に車線変更せず、安全を確認できる次の機会を待ちます。
- 二輪車や乗用車が死角へ入った可能性がある
- 後続車との距離や速度差を判断できない
- 後続車に急ブレーキや急ハンドルをさせるおそれがある
- 黄色線など、進路変更が禁止されている道路標示がある
- 前方の渋滞、停止車両、工事区間への対応が必要である
- 雨、雪、夜間、逆光などで視界が悪い
- 架装や積載物によって必要な範囲を確認できない
- 短い距離で急ハンドルを切らなければ入れない
数値で確認|合図は約3秒前
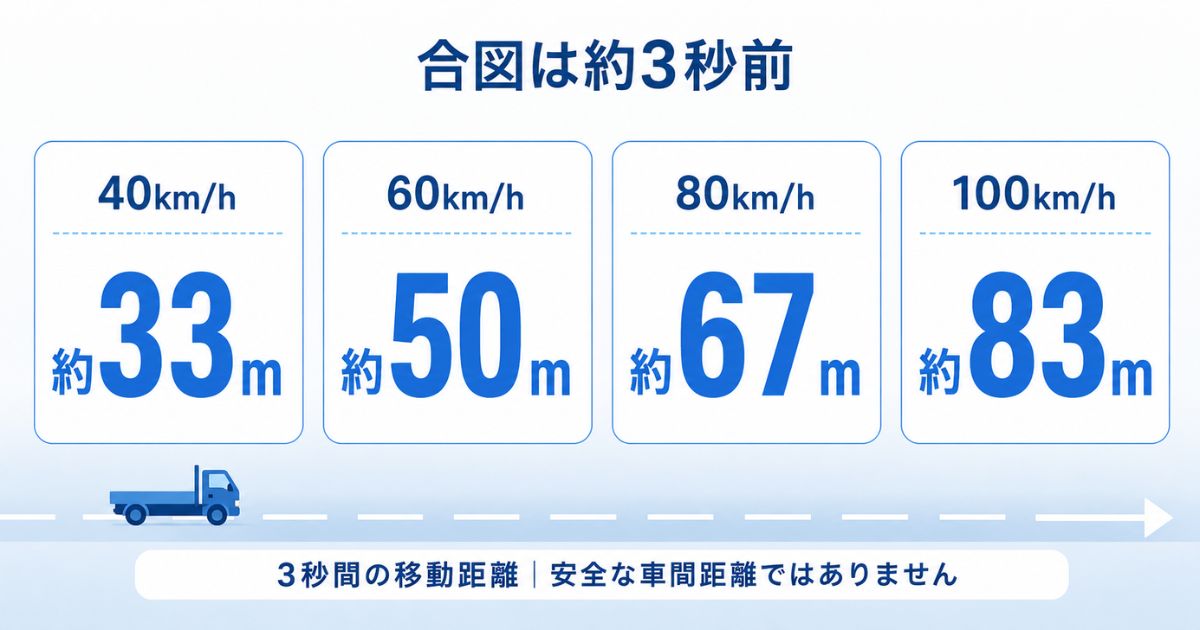
同一方向へ進行しながら進路を変える場合、合図は進路を変えようとする時の約3秒前に行います。ただし、合図前には前方やミラーで事前確認を行い、合図後も後続車との位置関係と死角を確認し続けます。
走行中の3秒間には、車両が次の距離を進みます。
| 走行速度 | 1秒間の移動距離 | 3秒間の移動距離 |
|---|---|---|
| 40km/h | 約11m | 約33m |
| 60km/h | 約17m | 約50m |
| 80km/h | 約22m | 約67m |
| 100km/h | 約28m | 約83m |
計算は「速度km/h÷3.6×3秒」で行い、読みやすいように四捨五入しています。
注意:上表は、3秒間に車両が進む距離の参考値です。安全な車間距離や、車線変更に必要な距離を示す数値ではありません。3秒が経過しても安全を確認できなければ、車線変更せず合図を戻して次の機会を待ちます。
合図と同時に車線をまたがない
合図は、周囲へ進路変更の意思を伝えるためのものです。隣接車線の車両に進路を譲らせるものではなく、合図を出したからといって安全が確保されたことにもなりません。
合図と同時にハンドルを切ると、周囲の車両が進路変更に気づき、速度や車間を調整する時間がなくなります。合図後の約3秒間に、次の確認を行います。
- 後続車が急速に近づいていないか
- 隣接車線の車両が死角へ移動していないか
- 前方車両が減速していないか
- 変更先にトラック全体が収まる余裕があるか
方向指示器は進路変更中も継続し、進路変更を終えたら速やかに解除します。
ミラーと目視の役割
ミラー、目視、カメラは、それぞれ確認できる範囲と役割が異なります。いずれか1つだけで安全を判断せず、実車の装備と視界に合わせて組み合わせることが重要です。
| 確認方法 | 主な役割 | 注意点 |
|---|---|---|
| サイドミラー | 後方や隣接車線の車両、距離、速度差の変化を確認する | ミラーの外側や車体直近に死角が残る |
| 補助ミラー・アンダーミラー | 車体側面や近距離の状況を確認する | 距離感や速度差の判断には向かない場合がある |
| 直接目視 | ミラーに映らない側方・後方の死角を補う | 長時間振り向かず、前方確認を失わない範囲で行う |
| 後方・側方カメラ | ミラーや目視による確認を補助する | 画角、映像の遅れ、汚れ、暗さがあるため映像だけで判断しない |
箱車やウイング車、積載物で後方が遮られる車両では、乗用車のように室内ミラーで後方を見通せないことがあります。その場合も、サイドミラー、補助ミラー、カメラなどで確認できない範囲が残るなら、車線変更を実行しない判断が必要です。
トラックの死角が生じやすい場所と、ミラーに映らない範囲を先に整理したい場合は、【トラックの死角】どこが見えない?ミラー調整と立ち位置で確認してください。
目視ではどこを確認するか
目視は、後方全体を見るためではなく、ミラーに映らない側方・斜め後方を補うために行います。
- 右へ変更する場合:右側方と右斜め後方の死角を確認する
- 左へ変更する場合:左側方と左斜め後方の死角を確認する
- 首を長時間後ろへ向けず、確認後は速やかに視線を前方へ戻す
- 姿勢や積載物の影響で必要な範囲を確認できない場合は変更しない
目視している間にも、前方車両の減速や停止、道路上の障害物へ近づきます。ミラーと目視は短時間で行い、前方確認とのバランスを崩さないことが重要です。
車線変更前に確認する3つの条件
道路標示と標識
車両通行帯が黄色の実線で区画されている場合は、その黄色線を越えて進路変更できません。白線で区画されていても、自車が通行している車線側に平行して黄色線が引かれている場合は、同様に黄色線を越えないようにします。
白線であっても、必ず自由に車線変更できるわけではありません。進行方向別通行区分、工事規制、警察官や誘導員の指示、周囲の交通状況を確認します。
後続車との距離と速度差
後続車との関係は、1回ミラーを見ただけでは判断しにくいことがあります。合図前と合図後に複数回確認し、ミラー内で後続車がどのように見えるかを比べます。
- 後続車が短時間で大きく見える場合は、接近している可能性がある
- 後続車との間隔がほぼ変わらなければ、速度差は小さい可能性がある
- 後続車が小さくなっていれば、間隔が広がっている可能性がある
- 距離や速度差を判断できない場合は車線変更しない
車間距離、前方不注意、速度差が関係する事故への対策は、【トラックの追突事故】原因と対策で詳しく確認できます。
変更先の空間
変更先には、キャブだけでなくトラック全体が収まり、変更後も前後の車間を確保できる余裕が必要です。
- 変更先の前車へ急接近しないか
- 変更先の後続車へ急減速を強いないか
- 車体後部が元の車線へ長く残らないか
- 急なハンドル操作をせずに移動できるか
「何m空いていれば安全」と一律には判断できません。走行速度、後続車との速度差、車体長、積載状態、路面、天候によって必要な余裕は変わります。
トラックで車線変更の確認が難しくなる理由
車体が長い
トラックは、キャブが変更先の車線へ入った後も、荷台後部が元の車線に残ります。車線をまたぐ時間が長くなりやすいため、変更を開始してから急に元の車線へ戻す操作は危険です。
中止判断は、ハンドルを切る前に行うことが基本です。合図後に後続車が接近した場合や、死角の安全を確認できなくなった場合は、進路を維持できる段階で合図を戻して待ちます。
架装や積載物で見え方が変わる
箱車やウイング車は、荷台によって車両後方を直接見通せない場合があります。ユニック車も、クレーン、荷台、積載物の位置によってミラーやカメラの見え方が変わります。
同じ車両でも、空車時と積載時では重量、重心、ハンドル操作への反応が同じとは限りません。2t車、3t車という通称だけでは、車体寸法、架装、死角の範囲は判断できないため、実車ごとの確認が必要です。
ミラー調整は運行前に行う
シート、ハンドル、ミラーの位置が合っていないと、運転中に確認できる範囲が狭くなります。発進前に運転姿勢を整え、左右の車体側面と後方が適切に映るようにミラーを調整します。
積載後は、荷物やシート、ロープ、クレーン装置などで視界が変わっていないかも確認してください。走行中に大きなミラー調整を始めず、必要な場合は安全な場所へ停車して行います。
シート、ハンドル、ミラーを含む運転環境の調整は、【トラックの運転席】視界・姿勢・調整ポイントで確認できます。
場面別の注意点
市街地
市街地では、二輪車、自転車、歩行者、路上駐車、交差点など、短い区間に多くの危険要因があります。
- 左側から進入する二輪車や自転車に注意する
- 路上駐車の陰から出てくる歩行者を想定する
- 交差点の直前で無理に車線を変えない
- 側方を確認できない場合は進路を維持する
幹線道路
幹線道路では、後続車との速度差に加え、前方車両の減速も同時に確認します。後続車ばかりを見ていると、前方の渋滞や停止車両への対応が遅れることがあります。
- 合図前と合図後に後続車との速度差を確認する
- 前方車両のブレーキ灯や車間も確認する
- 短い区間で連続した車線変更をしない
- 十分な空間を確保できなければ次の機会を待つ
高速道路
高速道路では、3秒間に進む距離が長くなるため、合図後も状況が大きく変化します。
- 本線への合流:加速車線を活用し、本線車両との位置と速度差を確認する
- 追越し後の復帰:追い越した車両との間隔を確保してから走行車線へ戻る
- 工事・渋滞末尾:車線変更より前方の減速・停止への対応を優先する
後方の確認に集中しすぎず、前方の渋滞末尾や落下物、工事車線規制を見落とさないようにします。
渋滞時
低速であっても、トラックの死角がなくなるわけではありません。車両間の短い隙間へ二輪車が入ることがあるため、ミラーと目視による確認を省略しないことが重要です。
- 短い隙間へ無理に入らない
- 二輪車が側方へ入った可能性があれば待つ
- 前車との車間が不足する場合は変更しない
- 合図を出しても譲られない場合は進路を維持する
車線変更してはいけない場面
次の状況では、車線変更を開始せず、進路を維持できる範囲で安全な機会を待ちます。
- 後続車に急ブレーキや急ハンドルをさせるおそれがある
- 側方・後方の死角を確認できていない
- 黄色線など、越えてはならない道路標示がある
- 変更後の前後の車間を確保できない
- 前方の停止や減速への対応が遅れる
- 短い距離で急ハンドルを切る必要がある
- 雨、雪、凍結、強風などで車両挙動が不安定である
- 積荷の偏り、荷崩れ、固定状態に不安がある
- 標識、道路標示、工事規制などで進路変更が禁止されている
車線変更の方法は、車両、架装、積載、道路、天候によって変わります。実車の取扱説明書、社内規程、安全指導、指導員の指示がある場合は、それらを優先してください。
合図不履行・進路変更禁止違反の点数と反則金
警視庁が2026年4月1日に更新した一覧では、合図不履行と進路変更禁止違反の基礎点数・反則金は次のとおりです。
| 違反の例 | 基礎点数 | 大型車の反則金 | 普通車の反則金 |
|---|---|---|---|
| 合図不履行違反 | 1点 | 7,000円 | 6,000円 |
| 進路変更禁止違反 | 1点 | 7,000円 | 6,000円 |
反則金一覧における「大型車」には、大型自動車だけでなく、中型自動車、準中型自動車、大型特殊自動車なども含まれます。「普通車」は普通自動車や軽自動車などを指します。
2t車、3t車という通称だけでは、どちらの区分に該当するか判断できません。運転する車両の区分は、車検証、運転免許区分、警察の最新資料などで確認してください。
事故が発生した場合の責任や処分は、この表の点数と反則金だけで決まるものではありません。事故状況、他の違反、負傷者の有無などにより扱いが変わります。
よくある失敗と修正方法

| よくある失敗 | 問題点 | 修正方法 |
|---|---|---|
| ミラー確認前に合図を出す | 進路変更を検討できない状況で合図を出す可能性がある | 最初に前方とミラーで交通状況を確認する |
| 合図と同時にハンドルを切る | 周囲が反応する時間がなくなる | 約3秒前に合図し、その間にミラーと目視で再確認する |
| ミラーだけで判断する | ミラー外側や車体直近の死角を見落とす可能性がある | 変更する側の側方・後方を短時間の目視で補う |
| 後方だけを見続ける | 前車の減速や停止への対応が遅れる | ミラーと目視後は速やかに視線を前方へ戻す |
| 距離だけを見て速度差を確認しない | 後続車の急接近を見落とす可能性がある | 合図前後に複数回ミラーを確認して変化を見る |
| 空車時と同じ感覚で操作する | 積載状態による視界や挙動の変化を見落とす | 運行前に視界、積載、車両挙動の条件を確認する |
FAQ
Q:トラックの車線変更では最初に何を確認する?
A:最初に前方の交通状況、道路標示、サイドミラーに映る後続車と隣接車線を確認します。車線変更を検討できる状況だと判断してから合図を出します。
Q:ウインカーは何秒前に出す?
A:車線を変え始める約3秒前に出します。ただし、3秒が経過すれば自動的に車線変更してよいわけではありません。合図後もミラーと目視で安全を再確認します。
Q:ミラーだけで車線変更してよい?
A:ミラーには映らない死角が残るため、変更する側の側方・後方を目視で補います。必要な範囲を確認できない場合は車線変更しません。
Q:後続車が速く近づいている場合はどうする?
A:車線変更せず、後続車が通過するなど安全な状況になるまで待ちます。後続車に急ブレーキや急ハンドルをさせるおそれがある状態では進路を変更しません。
まとめ
- 最初に前方とミラーで車線変更を検討できる状況か確認する
- 車線を変え始める約3秒前に合図する
- 合図後もミラーで後続車との距離・速度差を再確認する
- 変更する側の側方・後方の死角を目視で補う
- 安全を確認できなければ車線変更しない
- 急ハンドルを避け、緩やかに車線を変更する
- 変更後は合図の解除と前後の車間を確認する
次回の運行前に、運転姿勢、左右のミラー、カメラの映像、積載後の見え方を確認し、事前確認から変更後確認までの手順を実車に合わせて整理しておきましょう。
出典・参考情報
進路変更の禁止などを定めた道路交通法を確認できます。
進路変更時の合図の時期などを定めた法令を確認できます。
進路変更前の安全確認、約3秒前の合図、目視確認、黄色線を越える進路変更の禁止などを確認できます。
黄色実線による進路変更禁止規制の考え方を確認できます。
合図不履行違反、進路変更禁止違反の反則金と車両区分を確認できます。
合図不履行違反、進路変更禁止違反などの基礎点数を確認できます。
トラックの車両特性、危険予測、安全運転などの指導資料です。


コメント